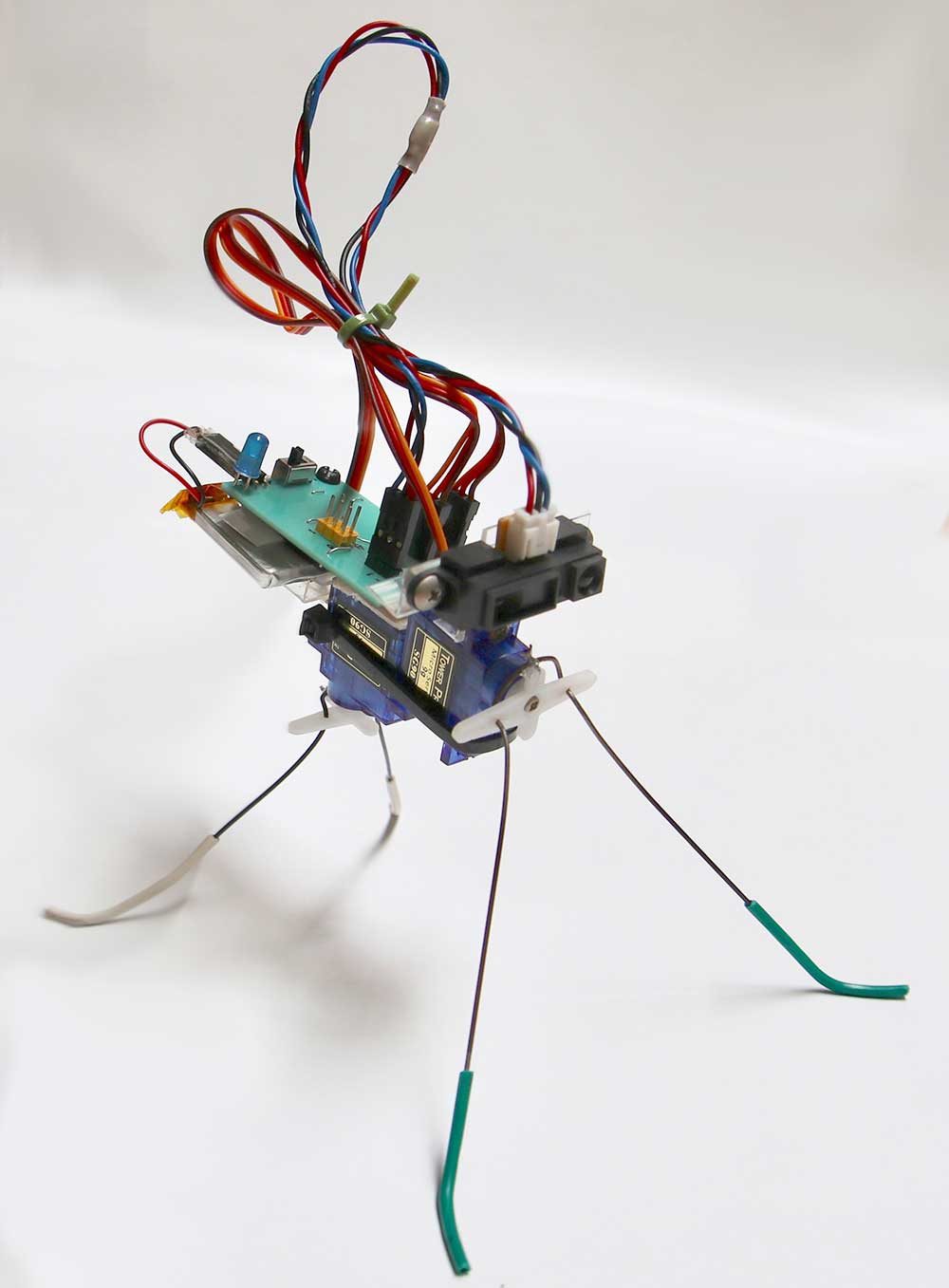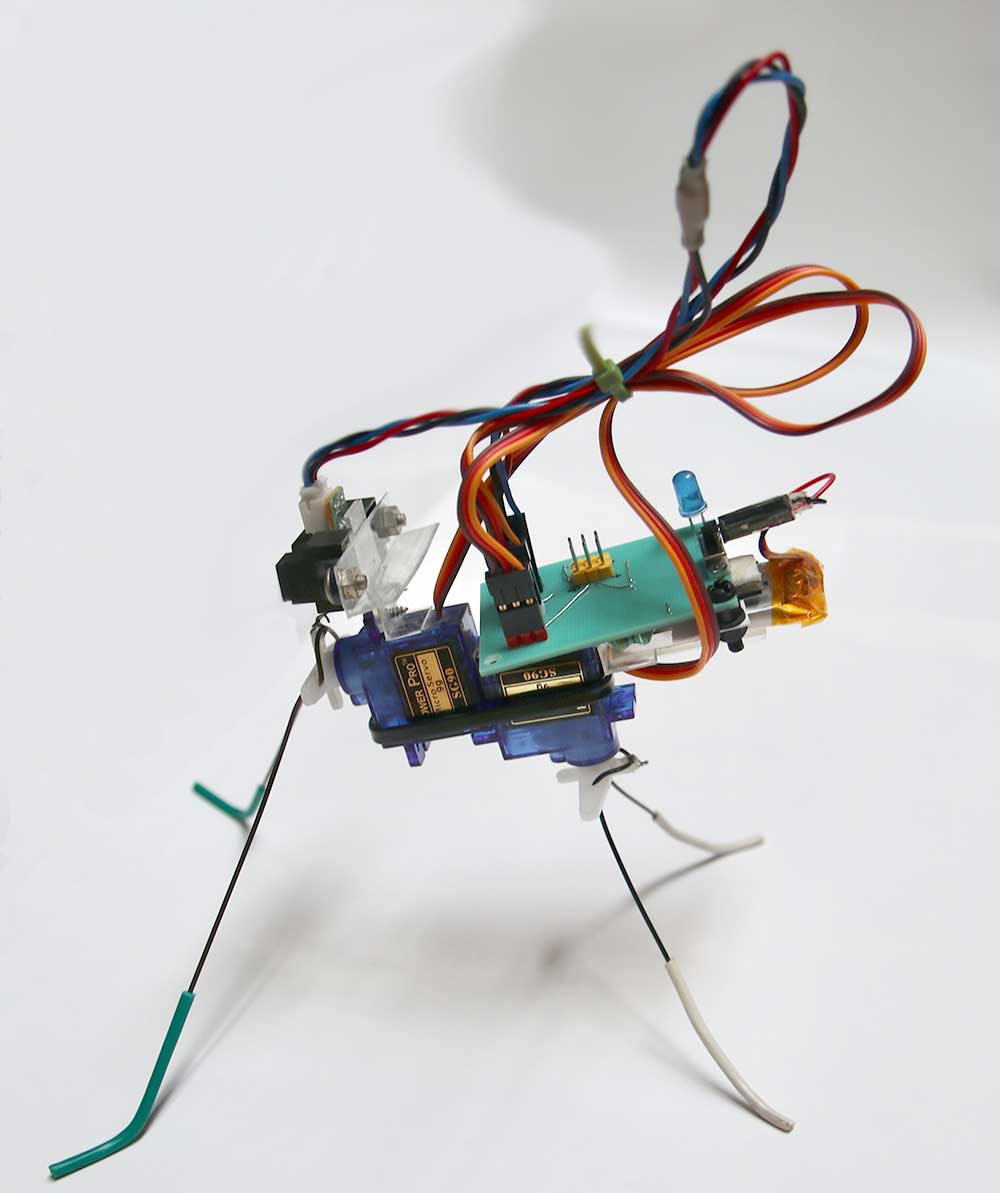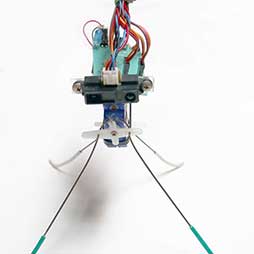
InsectBot
DFRobot社が販売している昆虫ロボット
ネット上では結構有名な昆虫ロボット。
DFRobot社がキットを販売している。これはそのパクリ。
キットに付属のCPUは「BEETLE」と言うAlduinoの亜種で、モーターのインターフェイスなどが独自のシールドで拡張できるようになっている。
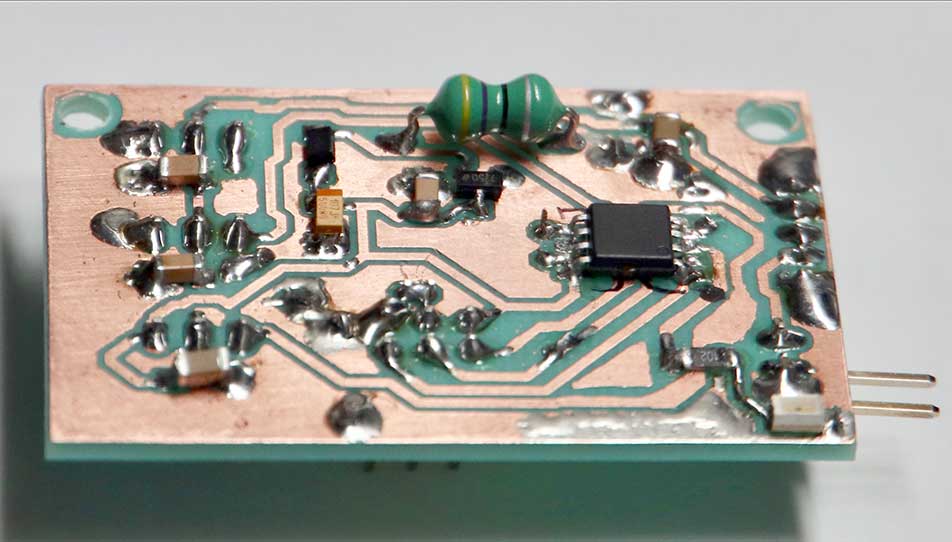
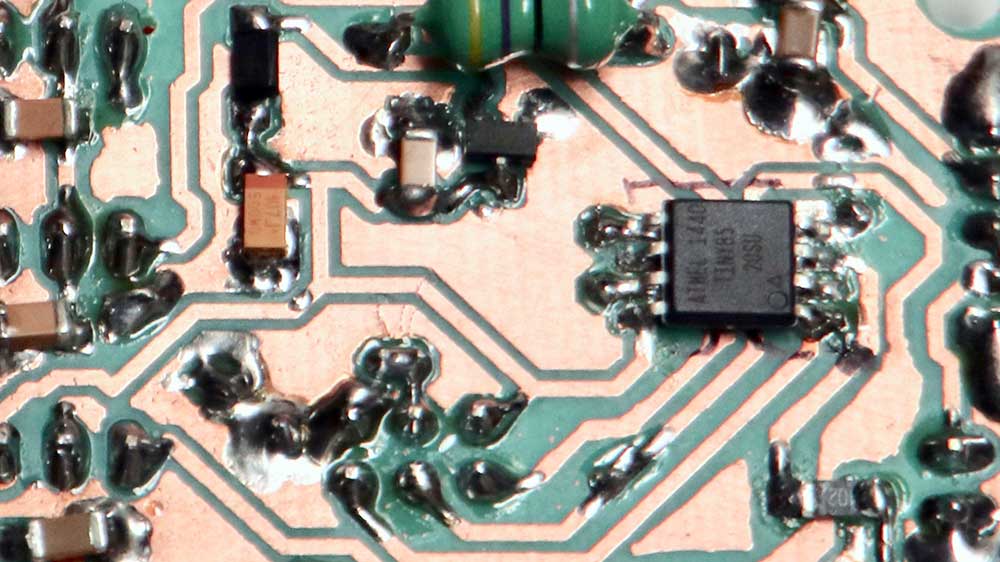
今回はCPUにAtTinyを使ってみた。そのため、Arduino標準のサーボのドライバが使えず、"SoftwareServo"ライブラリを使った。
前方センサーは、シャープの2Y0A21と言う赤外線センサーを使った。このセンサーは有名なセンサーなので説明は不要だろう。コンパクトなので、こう言った小さい機体には便利だ。ただ、ちょっと消費電力が多めなのと、電源電圧に敏感なので、注意は必要かも知れない。